Intercorporéité artefactée, entre réification et personnification
English
version >
Samira Ibnelkaïd, Dorothée Furnon, « Intercorporéité artefactée,
entre réification et personnification », Fabrique de
l’interaction parmi les écrans : formes de présences en recherche et en
formation (édition augmentée), Les Ateliers de [sens
public], Montréal, 2021, isbn:978-2-924925-13-3, http://ateliers.sens-public.org/fabrique-de-l-interaction-parmi-les-ecrans/chapitre3.html.
version:0, 15/06/2021
Creative
Commons Attribution-ShareAlike 4.0 International (CC BY-SA 4.0)
Dire que les choses sont des structures, des membrures, les étoiles de notre vie : non pas devant nous, étalées comme les spectacles perspectifs, mais gravitant autour de nous (Merleau-Ponty 1960, 269).
Les nouvelles modalités technico-corporelles de mise en présence des sujets par écran nous invitent à reconceptualiser les fondements de la définition goffmanienne de l’interaction comme « l’influence réciproque que les partenaires exercent sur leurs actions respectives lorsqu’ils sont en présence physique immédiate les uns des autres » (Goffman 1973). De cette définition, à l’aune des nouvelles pratiques sociales par écran, les notions de présence, d’intersubjectivité (« influence réciproque »), de corporéité (« physique ») et d’agentivité (« actions respectives ») méritent d’être revisitées.
Au cours de leurs interactions par écran mobile – ici notamment via l’usage d’un robot de téléprésence – les sujets émettent des actions dont l’auteur·rice est difficilement identifiable. L’agentivité (Butler 2002) distribuée entre sujet et tekhnê produit une indétermination potentielle dans l’imputabilité de la responsabilité éthique de l’action. Entre le ou la locuteur·rice, l’artefact et l’interlocuteur·rice se pose en effet la question de l’attribution du geste interactionnel, de son intention à son émission et à sa perception. D’autant plus que si l’interaction peut être de nature symétrique (Maingueneau 1996), l’interactivité (Weissberg 2002) quant à elle apparaît à sens unique. Ainsi le ou la pilote du robot peut réaliser une série d’actions et procurer un ensemble de sens que l’interlocuteur·rice ne peut réguler techniquement (interactivité du software en émission et non-interactivité du hardware en réceptionSur le Beam, l’usager·e peut par exemple augmenter ou baisser le volume de son micro sur son interface tandis que son interlocuteur·rice, face au robot, n’a pas la main sur le volume sortant (contrairement à Skype par exemple où le contrôle du volume peut se faire « des deux côtés »).↩︎). Cette asymétrie de l’interactivité avec l’artefact introduit une confusion illusionnelle entre sujet et objet qui se trouvent amalgamés, assimilés, substitués. Dès lors les modalités techniques et corporelles intersubjectives de mise en présence des sujets s’en trouvent affectées.
C’est le corps, interface des interactions, dont la définition se trouve ainsi mise en jeu. Le corps se fait en effet médiateur. Au cours d’interactions par écran, il se révèle parfois invisible, souvent partiellement perceptible, en tout cas élusif. Il est alors notable que :
Ce qui survient avec le numérique, c’est une hybridation complexe entre la pensée et le geste, entre l’objet-ordinateur et le sujet-utilisateur qui déploie un savoir-faire habile et non systématique, relevant du flou, de l’à-peu-près, du bricolage créatif autant que des routines (Frias 2004, 10).
Il apparaît alors indispensable d’explorer les nouvelles modalités technico-corporelles pratiques à l’œuvre dans la mise en présence hybride et polyartefactée. Il s’agit d’analyser dans une perspective interactionniste et phénoménologique les enjeux épistémologiques et éthiques d’une forme de présence étendue impliquant tout à la fois la réification des sujets animés et la personnification des artefacts communicationnels. Processus participant de la co-construction d’une intercorporéité, d’un intermonde.
Les modalités technico-corporelles d’interaction (par écran)
Interaction et sujets de l’action
Au cours de leurs interactions avec autrui, les sujets produisent des actions multimodales dont ils sont tenus pour responsables. Cette capacité d’action des sujets sur leur environnement, sur les objets et sur autrui, ainsi que la perception de cette faculté par le sujet relève de la notion d’agentivité (agency, Butler 2002).
L’agentivité (nos actes, nos pensées, nos désirs sont nôtres et nous sommes relativement conscients de les causer et de les contrôler) associée à la résonance (capacité automatique, non consciente qui nous pousse à faire résonner en nous les émotions d’autrui) et à l’empathie (processus actif permettant de comprendre la cause de l’état émotionnel d’autrui et lui témoigner reconnaissance et compréhension de ses émotions) constituent les trois dimensions des interactions qui autorisent les interactant·e·s à construire des liens sociaux et qui garantissent la cohésion du groupe, aussi bien que l’autonomie de chacun·e vis-à-vis des autres (Nadel et Decety 2006). Les individus sont en effet liés les uns aux autres par résonance et par empathie : par résonance, ils reflètent automatiquement les attitudes et les mimiques des autres et par empathie ils ressentent de façon partielle (Tisseron et al. 2013) ce qu’autrui éprouve, ce qui permet par exemple de lui venir en aide. En revanche, l’agentivité garantit à chacun·e qu’il·elle est maître de ses actes, évitant ainsi toute confusion entre soi et autrui.
Neurones miroirs
Il apparaît, au niveau cognitif, qu’un ensemble de régions cérébrales est activé à la fois lorsque le sujet exécute une action et lorsqu’il observe cette action produite par autrui. Ce sont les neurones dits « miroirs » qui induisent cette résonance motrice (Rizzolatti, Sinigaglia, et Raiola 2008 ; Keysers et Gazzola 2010). Des expérimentations révèlent néanmoins que la résonance motrice s’active uniquement lorsque le modèle observé est un être humain et non un robot (Nadel et Decety 2006). Ces neurones distinguent en effet les agents biologiques des objets ; ils ne s’activent que lorsque l’agent est un être vivant. Par ailleurs une région cérébrale joue un rôle pivot dans l’expérience de l’agentivité : elle compare les signaux qui sont issus du soi et ceux issus de l’environnement. Par là, l’individu est à même de distinguer les conséquences d’une action qu’il a déclenchée de celles liées à un événement extérieur. L’individu est donc conduit à reconnaître cognitivement et intuitivement qu’il est l’auteur et le responsable de ses propres actions ; l’agent (Nadel et Decety 2006).
Pourtant cette distinction se révèle délicate à opérer dès lors qu’une médiation entre en jeu entre la production d’une action et sa perception par autrui. En effet, au cours d’une interaction par écran, le·la locuteur·rice produit physiquement des activités langagières multimodales qui sont en partie retransmises par l’outil à l’interlocuteur·rice. Les éléments apparaissant à l’écran de l’interlocuteur·rice peuvent être définis comme des « indices » de l’action, au sens de Charles Sanders Peirce (1960). La restitution des éléments d’action se réalise conjointement par l’outil et l’usager·e, et est subordonnée aux affordances. Ces dernières « entrent en jeu au cours d’une activité instrumentée et se définissent comme l’ensemble des possibilités et contraintes de l’environnement, qui donnent aux agents différentes options pour agir » (Lamy 2010, 3).
Affordances
La technologie se comprend alors comme « un ensemble d’affordances qui se dévoilent dans et par les efforts que déploient les acteurs pour interagir avec l’artefact » (Hutchby 2001, 146). Ainsi l’objet technique est à considérer comme « un partenaire agissant d’une relation autant habilitante que contraignante » dans la mesure où il agit comme « une interface entre le projet d’action qui a été déposé en lui et le sujet actif dans ses usages de ces interfaces techniques » (Voirol 2013, 149). De ce fait, Olivier Voirol introduit une nouvelle dimension à la notion d’intersubjectivité en mettant en exergue la manière dont l’usager·e interagit avec un dispositif qui agit avec lui·elle comme un partenaire de l’interaction. L’usager·e doit alors faire preuve d’inventivité et de créativité dans son interaction avec le dispositif.
Les sujets et leurs artefacts communicationnels recourent alors tant au langage naturel que non naturel comme outil de médiation et d’intercession en mobilisant l’ensemble des ressources sémiotiques à leur disposition pour agir les un·e·s sur les autres (De Fornel 2013). Aussi la notion d’agentivité dans le domaine de l’anthropologie nous apporte-t-elle un éclairage précieux sur la distinction de l’attribution de la responsabilité de l’action entre sujet et objet. L’anthropologie opère en effet un décentrement du sujet humain intentionnel au profit d’une multiplicité d’agents, qu’ils soient humains ou non humains (De Fornel 2013).
Anthropologie et agentivité
À partir notamment d’études de pratiques rituelles au sein d’ethnies amérindiennes et dans une volonté de rejet du point de vue objectiviste, l’anthropologie autorise une double promotion de l’agentivité en ce que « les êtres vivants sont conçus comme des humains et les objets sont traités avec un statut d’êtres vivants, voire d’êtres humains participant comme tels à la réalité sociale » (De Fornel 2013, 39). Deux orientations entrent ainsi en opposition. La première considère l’agentivité comme stable et s’inscrit dans une perspective ontologique. La seconde définit au contraire l’agentivité comme instable et contextuelle : les animaux, les plantes ou les artefacts ne sont conçus comme des personnes qu’au sein d’activités spécifiques (de nature rituelle, relationnelle, etc.). Pour que ces entités deviennent des agents, doit être opéré « un travail de perception et de catégorisation réalisé par des êtres humains au sein d’activités quotidiennes ou rituelles » (De Fornel 2013, 39). De là, il nous apparaît que cette seconde approche de la notion d’agentivité, comme artefactuelle et contextualisée, interroge la responsabilité des actions exercées en interaction par écran notamment le rôle joué par la tekhnê dans les actions de communication.
Corporéité de l’(inter)action
Quelle que soit la nature de l’agentivité, la réalisation de l’action passe nécessairement par une activité corporelle en amont, que celle-ci soit synchrone ou asynchrone, auto-initiée ou hétéro-initiée. Les interactions sociales sont par nature des interactions de corps à corps (Cosnier 2004), car en effet « si l’énonciateur pense et parle avec son corps, l’énonciataire perçoit et interprète aussi avec son corps » (Cosnier 2004). Il nous semble ici pertinent de repenser la corporéité dans l’interaction sociale à partir d’une approche phénoménologique dans la mesure où l’origine étymologique du terme « phénomène » se trouve dans le verbe grec φαινεσθαι : apparaître, se montrer. L’apparition préfigure l’entrée en contact du sujet et de l’objet ou de l’autre, de leur décisive « prise de connaissance » (Heidegger 1985). Comme l’explique Maurice Merleau-Ponty dans sa Phénoménologie de la perception (1945), le corps ne peut être considéré comme un objet au monde mais comme moyen de notre communication avec lui.
Schéma corporel
Le corps se définit comme « horizon latent de notre expérience, présent sans cesse avant toute pensée déterminante » (Merleau-Ponty 1945, 109). Ainsi, le contour de mon corps constitue une frontière que les relations d’espace ordinaires ne peuvent franchir (Merleau-Ponty 1945, 114). L’appréhension par le sujet du corps et de la position de chacun de ses membres passe par un « schéma corporel » (Merleau-Ponty 1945, 114). Ce dernier ne renvoie pas au simple résumé des expériences corporelles, mais bien plus à une « prise de conscience globale de ma posture dans le monde intersensoriel, une “forme” » (Merleau-Ponty 1945, 116). Néanmoins, au-delà d’être une forme, le schéma corporel est une dynamique en ce sens que le corps apparaît au sujet comme posture en vue de l’accomplissement d’une certaine tâche actuelle ou possible. Il convient alors de considérer la spatialité du corps différemment de celle des objets extérieurs. Les objets tiennent d’une « spatialité de position », tandis que le corps tient d’une « spatialité de situation » (Merleau-Ponty 1945, 116).
Corps polarisé
Dès lors, l’application d’un déictique du type « ici » à la position du corps ne désigne pas, comme pour un objet extérieur, une position déterminée par rapport à d’autres positions mais l’ancrage du corps actif à un objet, la situation du corps face à ses tâches. Il apparaît que le corps est « polarisé par ses tâches, il existe vers elles, il se ramasse lui-même pour atteindre son but, et le schéma corporel est finalement une manière d’exprimer que mon corps est au monde » (Merleau-Ponty 1945, 117). Le corps tend à incorporer les actions dans lesquelles il s’engage au point que ces actions participent à la structure du corps. Un accord s’établit entre ce que vise le sujet et ce qui est donné – entre l’intention et l’effectuation. Le corps se révèle alors l’ancrage du sujet au monde. Il en résulte que le corps « n’est ni dans l’espace ni dans le temps ; il habite l’espace et le temps » (Merleau-Ponty 1945, 162). Selon Merleau-Ponty, « en tant que j’ai un corps […] je suis à l’espace et au temps, mon corps s’applique à eux et les embrasse » (1945, 164).
Reste que les études phénoménologiques ont jusqu’alors centré leur intérêt sur la relation entre le Soi et l’Autre et entre Soi et l’objet délaissant de ce fait la médiation technique des relations interindividuelles. Or, comme le souligne Stéphane Vial, « tout phénomène est en soi phénoménotechnique. Il y a une technicité transcendantale de l’apparaître, c’est-à-dire une dimension technique a priori dans toute manifestation phénoménale ou “phanie” » (2013, 152). En effet, pour qu’un Autre ou un objet apparaisse à un Soi et inversement, une médiation technique est nécessaire quelle qu’en soit la forme. La phénoménotechnique générale impulsée par Gaston Bachelard nous rappelle que l’« ontophanie » – manifestation de l’être – nécessite une technique tant pour se réaliser que pour être observée.
Umwelt perceptif
La technique se révèle elle-même porteuse de phénoménalité autant qu’elle permet d’engendrer la phénoménalité, à savoir « la possibilité d’apparaître ou d’apparaître comme réel » (Vial 2013, 16). L’idée derrière le concept de phénoménotechnique est que les techniques ne consistent pas uniquement en des outils ; elles se révèlent être des structures de la perception. En effet, les systèmes techniques sont qualifiés par Vial de systèmes technoperceptifs en ce qu’ils « structurent au plan phénoménologique notre expérience du monde possible en créant un UmweltLa notion d’Umwelt désigne l’environnement sensoriel propre à une espèce ou un individu.↩︎ perceptif dans lequel baignent toutes nos perceptions » (Vial 2013, 31). De ce fait, les perceptions du sujet relèvent de structures techno-transcendantales qui elles-mêmes dépendent de la technique de l’époque (imprimerie, téléphone, internet, etc.) (Vial 2013, 31).
Avec l’avènement des nouvelles technologies, le corps est perçu par certains comme « un indigne vestige archéologique amené à disparaître » (Le Breton 2001, 20). Si la problématique de la relation entre le corps et les technologies fascine et inquiète tant, c’est qu’elle renvoie au mythe d’un esprit séparé du corps, d’un être artificiel que le savant pourrait créer, d’une communication parfaite sans malentendu (Flichy 2009, 11). Cette crise de sensibilité du corps implique une tension entre deux modes différents de se rapporter au corps ; en l’occurrence la tension entre une vision biomécanique héritée de la modernité et une vision virtuelle du corps issue de la postmodernité (Casilli 2012, 6). Or la crainte de la disparition du corps « englouti par un écran d’ordinateur est moins un risque réel qu’une réaction paradoxale à son hypertrophie imaginaire, à son omniprésence » et ce car notre société exalte le corps en référent ultime (Casilli 2009, 3). L’ontophanie numérique affectant globalement la présence phénoménologique des choses mêmes, il ne s’agit pas d’une disparition du corps mais de nouvelles formes d’apparitions corporelles (Vial 2013, 239).
Analyse de séquences de personnification et réification
Positionnement scientifique
Notre démarche d’analyse des modalités technico-corporelles d’énaction de l’intersubjectivité par écran se fonde sur une méthodologie interdisciplinaire au croisement entre ethnographie visuelle (Banks et Morphy 1997 ; Ruby 2000 ; Pink 2007 ; Dion 2007, etc.), analyse multimodale des interactions (Goffman 1973 ; Cosnier 2004 ; Mondada 2008 ; Kerbrat-Orecchioni 2010 ; Traverso 2012, etc.) et analyse phénoménologique (Husserl 1929 ; Merleau-Ponty 1945 ; Le Breton 2001 ; Vial 2013, etc.). Il s’agit d’analyser des séquences d’interactions sociales à partir de l’expérience des sujets, de leur perception et action corporelles hors et par écran. Nous portons une attention particulière aux ressources langagières multimodales liées à la corporéité (verbal, geste, mimique, regards, postures) et plurisémiotiques liées aux médias (images, graphismes, vidéos, liens, techno-discursivité) convoquées par les interactant·e·s. À cet effet notre analyse audiovisuelle des interactions se fonde sur des enregistrements qui constituent à la fois le support et l’objet d’une analyse intrinsèque (transcription incrustée et enrichissement sémiotiqueL’enrichissement sémiotique consiste à dénoter les activités technico-corporelles des participant·e·s par l’incrustation de signes sur le document audio-visuel. Il participe de la démarche ethnographique visuelle traitant l’image comme élément intrinsèque du processus de recherche.↩︎). Il s’agit d’étudier les comportements technico-corporels sur et hors écran des participant·e·s à l’interaction polyartefactée.
États de la médiation
Nous proposons de porter notre attention sur des séquences interactionnelles problématiques survenant au cours des séances de séminaire auxquelles les sujets ont participé. Il s’agit de séquences faisant l’objet d’un défaut de médiation ou d’appréhension de cette médiation et impliquant une mise en suspens du cours d’action ordinaire.
Nous identifions plusieurs étapes dans le processus de médiation en situation problématique. En premier lieu survient la démédiation au cours de laquelle l’incident surgit, la communication n’est plus assurée, le média ne remplit plus son rôle et manque à ses fonctions. En deuxième lieu, se mettent en place des tentatives de remédiation ; l’incident est pris en charge, la médiation est en cours de réparation et le média peut à cet effet être relancé, remplacé ou complété. Enfin, il y a immédiation dès lors que l’incident est résolu, le média assure ses fonctions, la communication est transparente et donne l’illusion d’une communication immédiate. Des actions sont donc menées par les interactant·e·s afin de prendre en charge la médiation technico-corporelle à partir de ressources multimodales et plurisémiotiques.
Par ailleurs, ces actions font l’objet, au cours du processus de médiation, d’un travail d’instanciation de la part des sujets. Ces derniers incarnent en effet des instances particulières à des instants spécifiques de l’interaction que nous identifions comme suit. Les sentinelles veillent à la présence étendue et signalent aux procurateur·rice·s les incidents de médiation. Ils guettent les signaux de démédiation. Les procurateur·rice·s sont au cœur du dispositif de médiation et assurent technico-corporellement la présence des interactant·e·s. Ils opèrent la remédiation. Les témoins assistent à l’événement interactionnel et participent de la présence étendue sans intervention directe. Ils jouissent de l’immédiation.
L’identification de ces instances et états de la médiation nous permet de mieux appréhender les modalités technico-corporelles pratiques de mise en présence des sujets dans les séquences qui suivent et plus particulièrement les effets de personnification et de réification qu’elles induisent. Les phénomènes de personnification des artefacts renvoient aux situations au cours desquelles les sujets attribuent des propriétés humaines aux objets concrets de la médiation, les font vouloir, pouvoir, agir, etc. Les phénomènes de réification des animés, consistent au contraire, à considérer autrui comme un objet, lui retirant ses propriétés humaines et prenant le risque de nier toute forme d’empathie. Il peut s’agir de phénomènes conscients ou inconscients, volontaires ou involontaires.
Séquences interactionnelles de personnification de l’artefact
Nous analysons ici trois séquences interactionnelles au cours desquelles est opérée une personnification d’artefacts :
- Séquence 1 – Attribution, à visée humoristique, de l’éternuement d’une participante à son robot.
- Séquence 2 – Octroi d’une agentivité au robot lors de la distribution des tours de paroles.
- Séquence 3 – Simulation d’un acte de clôture physique (bise) adressé aux participantes artefactées.
Séquence 1 : « Le robot éternue »
Au cours de cette séquence, un échange suit la data session de Morgane, la parole est à Jean-François. Pendant son tour de parole, Amélie (présente via le robot Beam) éternue. Si, en face à face, il s’agirait probablement d’un non-événement interactionnel, par écran cette occurrence donne lieu à des réactions particulières.
L’attention de la majorité des participant·e·s est tournée vers Jean-François. On note que dans cette optique, Dorothée tourne la webcam vers le locuteur, à sa demande, permettant aux participant·e·s ex situ de l’avoir dans leur champ de vision par écran. Il s’agit donc ici d’une situation de remédiation au cours de laquelle Jean-François incarne l’instance de sentinelle et Dorothée celle de procuratrice.
L’attention est donc focalisée sur le locuteur et l’éternuement soudain d’Amélie pilotant le robot crée alors d’autant plus la surprise qu’aucun indice corporel ne le présageait. Cette absence d’indice est dû au positionnement du robot dans l’espace ; l’écran de ce dernier fait face uniquement à Morgane et n’est donc pas perceptible pour tout le reste du groupe. Dès lors aucun élément ne leur permet de l’anticiper.
Par ailleurs le son de l’éternuement n’est pas celui d’Amélie mais celui de sa retransmission par le robot (cf. les notions de façades primaires et façades secondaires, (Ibnelkaïd 2016)). Dès lors, Morgane ayant un accès visuel au visage d’Amélie peut de façon discrète, spontanée et rapide lui souhaiter « à tes souhaits » tandis que Christine esquisse par échoïsation le même énoncé mais qu’elle n’achève pas et poursuit plutôt par des rires. Cette dernière, en l’absence d’indice corporel et en la présence d’un son artefactuel, attribue l’occurrence à l’artefact soulignant l’effet comique « le robot éternue » en riant. Ce rire se propage chez les participant·e·s alentours ne percevant effectivement de manière concrète que l’objet et non l’humain en faisant usage.
Mais le locuteur en cours poursuivant son tour de parole, et l’interlocutrice principale lui portant son attention, les rires se dissipent et Amélie prend l’initiative de tourner l’écran et la caméra du robot vers Jean-François pour partager également son attention sur l’activité interactionnelle en cours.
La personnification de l’artefact est ici volontaire et à visée humoristique et se fonde sur l’absence d’indice d’activité corporelle perceptible par une partie de l’audience.
Séquence 2 : « Le robot me tourne le dos »
Au cours de cette séquence, la conférence des invités s’achève et laisse place aux échanges. Il s’agit alors pour Christine d’expliciter la méthodologie de prise de parole préférable, à savoir se signaler en levant la main pour « réserver » son tour de parole, que Christine se chargera de distribuer.
En premier lieu Christine explique donc « qui veut oh j’pense qu’on va faire comme l’aut’ fois hein (.) c’est à dire que vous levez la main en levant la main » et précise « et puis pour ceux qui sont à distance hein pareil vous me faites signe et je vous donne la parole en distribuant à l’avance ». L’expression « lever la main » vis-à-vis des participant·e·s in situ laisse place à l’énoncé « faire signe » concernant les sujets ex situ, permettant d’élargir le spectre des signaux sémantiques.
Pour autant, cette proposition de construction des tours de parole atteint ses limites quant au cas de la médiation par robot dans la configuration spatiale en cours. Ce risque de défaut de médiation est pointé par Françoise qui joue ainsi le rôle de sentinelle préventive « sauf le robot tu vas pas le voir ». Christine confirme ce défaut de médiation technico-corporelle et le justifie « ah oui le robot parce qu’il me tourne le dos là ». La personnification du robot se traduit ici par une agentivité attribuée à ce qui est représenté dans le discours comme son schéma non pas corporel ici mais artefactuel.
Dès lors, Christine propose une forme indirecte de remédiation en poursuivant son discours de personnification de l’artefact à la troisième personne et en lui attribuant une agentivité volontaire et pensée « mais euh il va se retourner parce que de toute façon il va suivre les autres au bout d’un moment ». Le cours d’action à suivre est présenté comme une forme de pratique routinière de la part du robot de téléprésence qui aurait développé une forme de médiation propre vis-à-vis des autres artefacts et une maîtrise de son schéma artefactuel, de sa posture dans l’espace en accord avec la situation d’interaction. Il est son propre procurateur, indépendant.
Reste que les actions de déplacement sont à attribuer à la pilote du robot qui en est l’initiatrice. C’est elle, ex situ, qui a développé une pratique routinière d’appropriation de l’espace interactionnel par le prolongement de corporéité que représente l’artefact in situ. C’est pourquoi à la réception de l’énoncé de Christine, Amélie met son robot en mouvement afin de ne plus seulement faire face aux invité·e·s mais de partager une perception mutuelle avec Christine et les autres membres du groupe afin de faciliter les prises de parole. Ce mouvement engagé par Amélie et mis en action par le robot est ponctué verbalement par Christine « voilà » qui valide ainsi l’illustration de son vœu de confiance en l’autogestion de la médiation par la pilote et son robot perçus alors comme en symbiose. Validation provoquant le sourire d’Amélie.
Séquence 3 : « Donc je vous fais une bise hein »
Cette séquence interactionnelle constitue une clôture d’interaction de séminaire dédié à une séance de travail en groupe restreint, clôture au cours de laquelle les éléments posturo-mimo-gestuels propres à l’interaction familière de face à face sont ici utilisés dans l’échange par écran.
Christine, participante in situ se lève de son siège en énonçant à haute voix l’action projetée « donc je vous fais une bise hein ».
S’en suit la simulation d’un acte de clôture français typique « la bise » distribué tour à tour au robot Beam, à l’ordinateur et au Kubi. La personnification des artefacts est ici encore volontaire induisant à la fois un effet comique (cf. Séquence 1), une personnalisation et une individualisation de l’acte de clôture. Acte qui, par écran, peut aisément se trouver menaçant pour les faces dans la mesure où il n’est pas progressif mais au contraire abrupt (rupture du face à face immédiat) (Ibnelkaïd 2016) d’autant plus dans une configuration polylogale polyartefactée qui implique une communautarisation duale (« en présence » / « à distance ») (ou membership categorization) (Sacks 1992). Cette personnification des artefacts en clôture des interactions constitue alors un adoucisseur voire un acte flatteur pour les faces (Kerbrat-Orecchioni 2005).
Séquences interactionnelles de réification de l’animé
Nous portons ici notre attention sur trois séquences interactionnelles au cours desquelles est opérée une réification des animés :
- Séquence 4 – Réification polymorphe des organes perceptifs d’une participante artefactée.
- Séquence 5 – Assimilation d’un sujet à son artefact au cours d’une proposition de remédiation.
- Séquence 6 – Mise en abîme de la prise en charge de la mobilité d’une participante artefactée lors d’une injonction au déplacement du robot.
Séquence 4 : « She’s there, her eye »
Au cours de cette séquence, c’est cette fois la conférencière invitée qui participe au séminaire via le robot de téléprésence Beam. Il s’agit dans cet extrait d’un échange plus précisément entre celle-ci (Susan Herring) et Christelle. Susan s’interrompt au cours de sa réponse à une question de Christelle pour vérifier l’état de la médiation, cette dernière participant également ex situ via la plateforme de visioconférence Adobe Connect.
Assurant le rôle de sentinelle, Susan interroge le groupe de manière indirecte « I don’t know if Christelle can hear me », ce à quoi Christelle répond en précisant la nature du défaut de médiation qui ne concerne pas l’audition mais la vision « Yes but I can’t SEE you ». Car en effet, Susan positionne son robot de téléprésence face à la vidéoprojection murale de l’image Adobe Connect de Christelle et non face à sa webcam placée sur une des tables de séminaire.
Il apparaît en effet que, pour Christelle, deux sens différents de son schéma corporel sont dispersés (la vue et l’ouïe) en réception et, pour Susan, une distinction s’opère entre l’artefact d’exposition de l’image, projection de soi, et l’artefact de réception de la communication, captation par webcam. Les deux modes étant généralement réunis tant, bien entendu, en face à face physique qu’avec les ordinateurs, tablettes et mobiles au sein desquels la webcam est placée le plus proche possible de l’image afin d’éviter ce type de hiatus confusionnel.
La réponse de Christelle suscite les réactions à visée justificative de la part des participantes les plus proches spatialement de la webcam. Après que Samira, Morgane et Christine ont relayé verbalement la parole de Christelle, Morgane et Christine expliquent « she’s there » en pointant et touchant la webcam. Et Morgane de préciser « this is her » et Christine « her eye ». Cette réification de l’animée apparaît alors polymorphe. Christelle est tour à tour perçue comme étant dans l’objet matériel, en son sein – « she’s there » –, puis comme étant l’objet lui-même – « this is her » – et comme étant une partie de l’objet, un organe dispersé dans l’espace matériel artefactuel – « her eye ». Susan, accoutumée des interactions artefactées mobiles, comprend alors « alright alright I was talking to the screen ». Le polymorphisme de la réification par les reformulations successives se fonde sur une volonté d’être les plus explicites possible quant à la dispersion des « organes » de communication et de faciliter leur hybridation et intégration dans l’interaction en cours.
Séquence 5 : « Tu veux que je te tourne ? »
Durant une séance de travail groupal, l’attention doit se porter sur l’activité en cours focalisée sur le mur-tableau sur lequel Caroline illustre ses propos. Il s’agit alors de s’assurer de la capacité de chacun·e à percevoir le tableau et ce qui y est inscrit.
Christine incarne alors l’instance de sentinelle en s’assurant de la validité de la médiation pour Christelle : « tu vois quelque chose Christelle là ? ». Ce à quoi Christelle répond, en précisant qu’il y a bien médiation mais que celle-ci est insuffisante, « euh ouais mais pas bien » et initie immédiatement un énoncé portant sur la remédiation. Elle ne recherche pas de procurateur·rice in situ dans la mesure où elle mène déjà une action de remédiation. Il s’agit pour elle de remplacer l’artefact de perception du mur (la webcam mobile d’ordinateur connectée à Adobe Connect) par l’artefact qui lui servait jusqu’alors à percevoir ses collègues (la webcam de la tablette Kubi connectée à Skype). Christine valide la proposition de remédiation – « ouais tourne toi » – en reprenant la tournure verbale de réification assimilant l’objet au sujet.
Pourtant grande est la tentation pour la participante spatialement la plus proche de l’objet Kubi de se faire procuratrice, dans la mesure où il suffit pour elle d’un simple geste mécanique, plus spontané, plus rapide et plus efficient que la recherche de résolution du bug de mobilité numérique. Mais ayant conscience de la réification qu’induit ce procédé de déplacement à la main et de l’acte menaçant pour la face qu’il représente pour la pilote du Kubi, Caroline s’abstient d’agir sans permission et interroge Christelle : « tu veux qu’j’te tourne ou pas (rires) ?D’autant plus que dans son usage du Kubi, la pilote peut organiser sur l’interface la position des participant·e·s in situ pour faciliter ses déplacements par un simple clic sur l’avatar de la personne à laquelle elle souhaite s’adresser. Le Kubi tourne alors dans sa direction. Déplacer mécaniquement le Kubi bouleverse alors cette organisation de la pilote.↩︎ ». Caroline ne semble pas entendre la réponse de Christelle qui ne valide pas cette proposition de procuration – « attends non » – et déplace le Kubi en précisant « j’veux pas être impolie ». Cette affirmation sera commentée ironiquement par Jean-François « trop tard » suivi d’un rire.
La posture de Caroline est en effet ambivalente dans cette situation de démédiation : d’une part elle procède physiquement à la remédiation, d’autre part elle prend la précaution de préciser son souhait de ne pas menacer la face de Christelle. Car, en effet, le geste de déplacement constitue une prise en charge de la mobilité du sujet, une atteinte à la liberté de mouvement de Christelle et une appropriation de sa corporéité dès lors qu’un processus de réification a déjà été engagé en début de séquence interactionnelle. Le sujet et l’objet ne font qu’un, déplacer l’un c’est déplacer l’autre, c’est s’immiscer dans son schéma corporel.
Séquence 6 : « Amélie tu peux te déplacer s’il te plaît ? »
Au cours de la même séance de travail, Amélie est présente via le robot Beam. Ce dernier se trouve dans le champ de la caméra destinée à capter les données d’interaction dans le cadre du projet de recherche.
Aussi, Morgane intervient-elle pour inviter Amélie à déplacer son robot en recourant à une tournure verbale de réification associant le sujet à l’objet et en identifiant l’élément dans le champ comme étant le sujet Amélie et non l’objet artefactuel : « Amélie tu peux te déplacer s’il te plaît t’es sur le (.) le champ de la caméra ? ». Néanmoins Morgane n’étant pas face à l’écran du robot, Amélie ne perçoit pas cette adresse. C’est alors Christine, se trouvant dans le champ perceptif d’Amélie, qui prend le relai de l’énonciation en s’apprêtant à réitérer l’injonction de Morgane – « Amélie tu peux euh faisant signe de la main de se rapprocher » – et s’interroge alors sur l’espace qu’elle peut occuper, « vers où elle peut aller ». Ayant défini le lieu le plus approprié, Christine guide Amélie verbalement et gestuellement dans le déplacement du robot : « voilà c’est bien (.) recule (.) non (.) voilà continue à te reculer (.) voilà tourne toi maintenant (.) voilà ». Il apparaît ici que Christine dirige Amélie qui dirige le robot. S’opère ici une forme de mise en abîme de la prise en charge de la mobilité. Une chaîne d’agentivité s’exécute depuis le sujet Christine in situ au robot Beam en passant par le sujet pilote Amélie ex situ.
Un double mouvement à l’œuvre dans l’intercorporéité artefactée
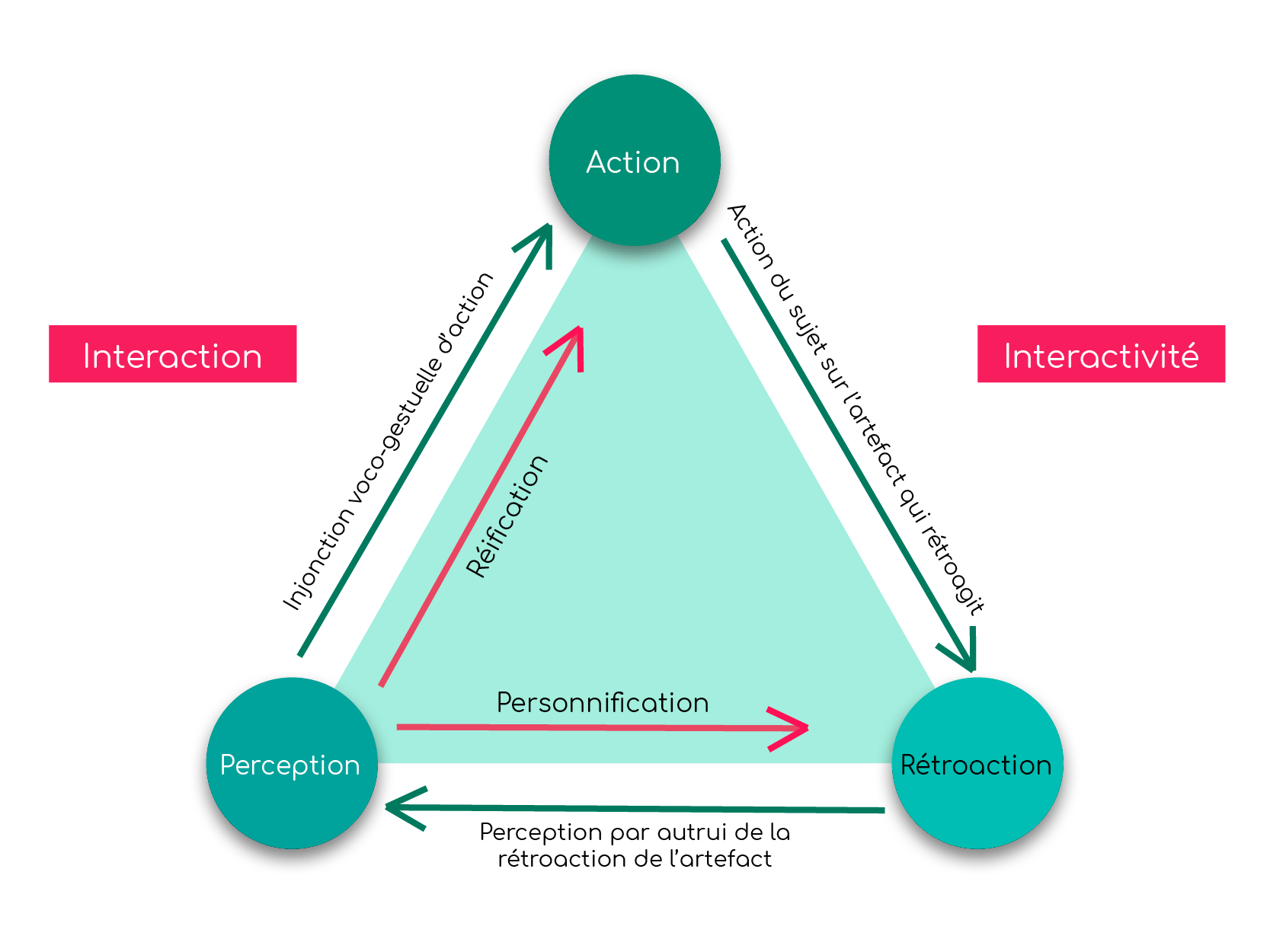
Il apparaît ainsi qu’un double processus de personnification et de réification est à l’œuvre dans la médiation technico-corporelle polyartefactée. D’une part l’attribution voco-gestuelle par autrui de caractéristiques artefactuelles au sujet animé – réification – et d’autre part l’attribution voco-gestuelle par autrui de caractéristiques humaines à l’artefact du sujet – personnification. Le premier mouvement, la réification, semble introduit dans l’interaction lorsqu’autrui émet des injonctions d’action à l’endroit de l’artefact qu’il ou elle amalgame alors, volontairement ou involontairement, avec le sujet qui le pilote. Dans le second mouvement, la personnification, dès l’action émise par le sujet sur l’artefact, ce dernier rétroagit et cette rétroaction perçue par autrui se trouve assimilée à une activité humaine. L’artefact perçu comme sujet de l’action se voit attribué une intentionnalité, une agentivité propre. Nous schématisons ce processus comme suit.
Il semblerait en outre que ce double mouvement de réification-personnification s’instruise dans une appréhension différenciée de la matière. Dans le cas de la réification de l’animé, il y a effet de « matérialisation » ; procédé consistant à « utiliser une matière en vue de donner forme à une abstraction » (Chatonsky 2015). Il s’agit d’« instrumentaliser la matière sous l’autorité d’une entreprise conceptuelle » et sa visualisation vise à traduire des données numériques sous une forme quelconque (image, son, etc.) » (Chatonsky 2015). Elle répond à un désir de rendre sensible une abstraction.
Matérialisation
On retrouve ce phénomène notamment au cours de la séquence 4 « She’s there, her eye » analysée précédemment, où les sens de la participante se trouvent verbalement matérialisés dans les artefacts lorsque Morgane et Christine expliquent « She’s there » en pointant et en touchant la webcam. Et Morgane de préciser « This is her » et Christine « Her eye ». La webcam est identifiée comme matière concrète du sens de la vue, elle le matérialise, et se substitue à ce qui en face à face physique est attribué organiquement aux yeux.
Dans le cas de l’effet de « matérialité », ici en situation de personnification de l’artefact, il s’agit d’envisager la matière comme déjà donnée et d’observer les réseaux tissés par cette matière (Chatonsky 2015).
Materialité
C’est le cas notamment au cours de la séquence 2 « Le robot me tourne le dos » précédemment analysée au cours de laquelle le robot est doté d’une matérialité anthropomorphique par l’une des participantes qui commente sa présence matérielle et son placement au milieu des autres sujets et artefacts. Lorsque la participante précise « mais euh il va se retourner parce que de toute façon il va suivre les autres au bout d’un moment », elle fait référence à l’indépendance du robot au milieu des autres artefacts et sujets et sa capacité agentive et matérielle à naviguer dans ce réseau.
Double processus
Nous schématisons ces effets de la manière suivante :

Dans ce double processus, l’artefact acquière une forme de persona, au sens anthropologique du terme, à savoir le potentiel de toute chose, qu’il s’agisse d’un objet ou d’un être humain, à s’affirmer comme présence singulière. Ce persona s’enacte dans une présence limite, une forme de présence ambiguë, passant par des degrés variables d’intensité, du plus matériel au plus invisible.
L’énaction d’un intermonde
La présence des sujets en interaction par écran traverse les espaces physiques et les médias communicationnels par les actions opérées multimodalement et plurisémiotiquement par ces sujets, leur corporéité et leurs artefacts. Il s’agit d’exploiter les ressources technico-corporelles à leur disposition afin de préserver la communication malgré les multiples cadres spatio-temporels. Ces ressources technico-corporelles sont mises en œuvre autant pour signaler les incidents de médiation – démédiation – que pour tenter de les résoudre – remédiation – et parvenir à un état de transparence du média – immédiation. À cet effet, les sujets, entre eux et avec les artefacts, se coordonnent et coopèrent tant explicitement qu’implicitement en incarnant des instances telles que les sentinelles signalant les incidents de médiation, les procurateur·rice·s réparant les incidents du dispositif de médiation, et les témoins participant à l’événement interactionnel, sans intervenir dans le processus de médiation. La gestualité est alors partagée. Il y a extension du schéma corporel par les artefacts et les autres sujets impliqués dans l’interaction et dans la mise en présence de chacun·e. Il s’agit d’introduire non seulement l’intersubjectivité dans le schéma corporel qui s’étend à autrui mais au-delà, une forme de transsubjectivité en ce qu’il dépasse et traverse la technique et la distance. Les corps font corps pour interagir dans un réseau technico-corporel complexe.
Le geste transsubjectif et son action s’inscrivent dans une chaîne d’agentivité distribuée. Chacun·e des interactant·e·s a la possibilité d’apporter sa contribution à la préservation de la communication par le moindre geste signifiant. Les affordances communicationnelles et le positionnement des corps et des artefacts dans l’espace impliquent une nécessaire coopération des sujets qui ne peuvent prendre en charge individuellement la médiation physico-numérique complexe et réticulaire. La mise en présence des sujets se traduit sous la forme d’un flux traversant sujets et artefacts. Le geste se constitue au sein d’une chaîne, il est initié par les un·e·s, poursuivi et achevé par d’autres, qu’ils·elles soient sujets ou tekhnê. L’agentivité distribuée garantit un champ d’action élargi.
Percepaction
Il y a alors extension actionnelle et perceptive. Il apparaît en effet que l’action est dépendante de la perception et de l’attention. Il est indispensable de percevoir et d’être perçu pour agir autant qu’il est nécessaire d’agir pour percevoir et être perçu au cours de ces interactions par écran. Cette coordination de la perception et de l’action intrinsèquement liées, constitue une même opération de « percepaction » (Roquet 2002), l’idée d’une sortie de soi pour percevoir et être perçu. Il s’agit par ailleurs pour Hubert Godard (1994), dans son analyse du mouvement, de « considérer la perception comme un geste », dans le sens d’un mouvement, une action à portée signifiante (1994, 68).
Aussi chaque opération de percepaction est-elle issue d’une hybridation sujet-artefact-autrui, introduisant autant des phénomènes de personnification de l’artefact que de réification de l’animé. Car en effet la corporéité est artefactée et les artefacts sont incarnés. Il y a intercorporéité dans cette extension percepactive.
Intercorporeité
Merleau-Ponty esquissait ce phénomène d’intercorporéité dans ses ultimes notes de travail :
Il n’y a pas de problème d’alter ego parce que ce n’est pas moi qui vois, pas lui qui voit, qu’une visibilité anonyme nous habite tous deux, une vision en général, en vertu de cette propriété primordiale qui appartient à la chair, étant ici et maintenant, de rayonner partout et à jamais, étant individu, d’être aussi dimension et universel. Avec la réversibilité du visible et du tangible, ce qui nous est ouvert, c’est donc, sinon encore l’incorporel, du moins un être intercorporel, un domaine présomptif du visible et du tangible, qui s’étend plus loin que les choses que je touche et vois actuellement (Merleau-Ponty 1964, 185).
Mes deux mains sont « comprésentes » ou « coexistent » parce qu’elles sont les mains d’un seul corps : autrui apparaît par extension de cette comprésence, lui et moi sommes comme les organes d’une seule intercorporéité (Merleau-Ponty 1960, 274).
Si le corps du sujet et celui d’autrui forment une intercorporéité, les objets ne sont pas en reste et participent de ce réseau de perception intersubjectif dans la mesure où « nos organes de perception se trouvent tant dedans que dehors, ils sont aussi à compter entre les choses par lesquelles nous accédons à une dimension spécifique du rayonnement de l’être » (Penayo 2016, 85).
La présence par écran émerge alors de l’expression plurisémiotique, multimodale et sensorielle des sujets artefactés et implique la chair et ses extensions. Les sujets sont donc des êtres sensibles qui se co-construisent dans l’interaction en s’équipant de technologies leur permettant de dépasser la distance physique et de se manifester dans des configurations spatio-corporelles multiples et réticulaires. Les sujets se rendent ainsi présents les uns aux autres par intercorporéité artefactée enactant ensemble un monde commun, un « intermonde » (Merleau-Ponty 1964, 317).